微专业介绍
人形机器人运动控制技术与应用微专业依托人工智能、信息科学专业集群,由长春建筑学院人工智能产业学院发起创办,开设机器人驱动与运动控制、机器人软件开发与仿真、人形机器人智能感知与交互基础等重要基础课程。
学院师资力量雄厚,拥有博士生导师、硕士生导师等一大批优秀教师队伍,其中博士、硕士学历者占90%以上,副高及以上职称教师占专任教师总数的65%。
学院开拓“人才培养为核心、科学研究为支撑、创新应用为出口”的创新发展模式,通过与产业界的深度合作与良性互动,实现对专业技术型、交叉复合型、创新创业型全方位多层次人才的多元化培养。学院面向产业特点与行业需求,形成“产学研赛创”深度融合的特色办学模式,实现学校培养与企业需求无缝对接。学院重视开放办学,积极推进校与校、校与企间的交流,先后与国内20余家知名人工智能企业、科研机构建立了校企合作关系,形成了一批校外实践基地。

开设面向专业及年级
全校工科类专业大二、大三年级学生
项目特色
1.课程体系创新:聚焦人形机器人核心技术,理论与实训结合,紧贴行业前沿需求;
2.灵活多样的教学模式:产学研融合,课堂与实训并重,企业导师深度参与;
3.多元化的培养模式:跨学科融合,创新创业导向,校企联合打造复合型人才;
4.广泛的企业合作:与知名企业共建实践基地,课程紧跟产业动态,强化就业竞争力;
5.丰富的教学资源保障:雄厚师资,设备先进,多媒体教学,全面提升学习效果。

培养目标
对标人形机器人运动控制系统运维岗位,培养学生具备人形机器人运动控制系统软硬件集成的基本技能。为适应社会主义市场经济需要,符合新时代科技发展趋势,增强学生的职业道德和职业适应能力,提高学生计算机与人工智能应用水平和跨专业融合的多方面素质,培养学生掌握人形机器人基本运动学与动力学、驱动与运动控制技术、系统综合与集成以及动态建模与仿真等基本理论知识,能独立分析人形机器人技术的相关问题并提出合理的解决方案。

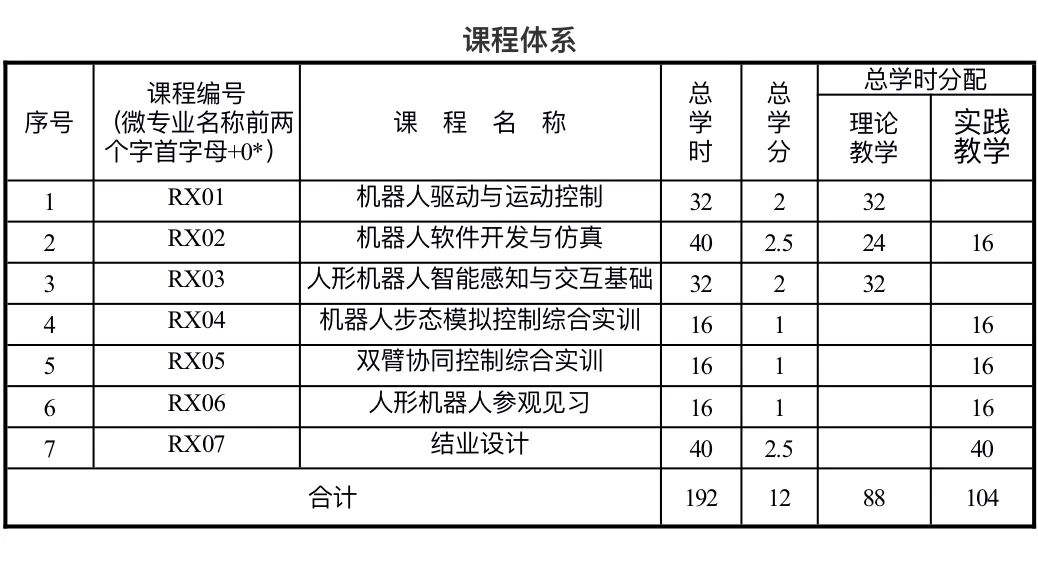
课程体系
课程简介
《机器人驱动与运动控制》:本课程旨在教授机器人驱动系统及运动控制策略,重点讲解伺服电机、传动系统的工作原理与应用及控制系统的设计与实现。通过采用项目驱动教学,结合实际案例进行控制系统分析的方式,学生将能够设计并实现人形机器人驱动控制系统的应用,具备解决机器人精确运动控制问题的能力。
《机器人软件开发与仿真》:本课程旨在将机器人软件开发与仿真的理论和应用相结合,致力于帮助学生掌握机器人的建模、仿真和编程技术,并培养学生初步掌握建立机器人算法测试平台的能力。
《人形机器人智能感知与交互基础》:本课程专注于人形机器人的智能感知与交互技术,旨在为学生提供深入理解机器人如何感知环境、理解人类指令并作出相应反应的基础知识。课程将涵盖机器人感知系统的基本架构,包括视觉、听觉、触觉等传感器的原理与应用。通过本课程,不仅能够提升学生的编程和系统设计能力,还能提高学生对人工智能和机器人技术的理解。
《机器人步态模拟控制综合实训》:本课程通过实训教学方式,强化学生对步态控制的理解和应用能力。内容涵盖步态规划、步态平衡控制及实操调试,重点在于步态模拟的实际实现。学生将通过动手实验,学习步态生成算法和控制技术,并掌握如何进行步态模式的优化与调试。课程旨在培养学生解决机器人步态控制问题的实战能力。
《双臂协同控制综合实训》:本课程教学内容包括双臂协同规划、运动控制算法和操作协调性优化等。通过实训教学,学生将亲身体验双臂机器人操作的复杂性,掌握协调控制的方法与技术。通过学习,学生能够设计和实现双臂协同的操作任务,具备实际问题的解决能力。
《人形机器人参观见习》:本课程通过组织学生参观相关企业和科研机构,帮助学生了解人形机器人在实际应用中的最新技术和发展方向。通过行业实践,拓展学生的视野。通过参与参观见习,学生将能更好地理解行业需求和技术应用,增强对所学知识的感性认知和实际理解。
联系方式
联系人:祝老师
电话号码:18943128952
未来已来,
掌握人形机器人技术,
站在智能时代的前沿!
加入我们,成为创新科技的引领者!